�����c����\��;S��
�l(f��)���ߣ��|�C(j��)е �l(f��)���r�g��2012/4/28 9:15:44
1�������ؙC(j��)�������c�ăɷN����
����(sh��)�؛_���z�yԪ���z�yԭ�c��̖��ʽ�IJ�ͬ�������ؙC(j��)�������c�ķ����ЃɷN�����ŵ귨�ʹ��_�P(gu��n)������ږ��c��������z�y���S��늄әC(j��)һ�D(zhu��n)��̖ͬ�r�a(ch��n)��һ�����c��һ����λ�}�_�ڙC(j��)е���w�ϰ��bһ���p���N�K��һ���p���_�P(gu��n)����(d��ng)�p�ړ��ԉ��p���_�P(gu��n)�r��������ŷ�늄әC(j��)�p�ٵ��ӽ�ԭ�c�ٶ��\(y��n)��������(d��ng)�p�ٓ��K�x�_�p���_�P(gu��n)�r����ጷ��_�P(gu��n)��������(sh��)��ϵ�y(t��ng)�z�y���ĵ�һ�����cλ��̖����ԭ�c����ڴ��_�P(gu��n)��������ڙC(j��)е���w�ϰ��b���F���ŸБ�(y��ng)ԭ�c�_�P(gu��n)���߽ӽ��_�P(gu��n)��������(d��ng)�ŸБ�(y��ng)�_�P(gu��n)��ӽ��_�P(gu��n)�z�y��ԭ�c��̖����������Ű�늄әC(j��)����ֹͣ�\(y��n)�����ԓֹͣ�c���J(r��n)��ԭ�c��
���c�������c���糲�ӽ�ԭ�c�ٶ�С��ijһ�ض�ֵ���t�����ŷ�늄әC(j��)����ֹͣ��ͬһ�c����Ҳ�����f�����M(j��n)�л�ԭ�c��������������C(j��)��ԭ�c�ı����Ժã����_�P(gu��n)�������c��ܛ����Ӳ���������������ԭ�cλ���S���ŷ�늄әC(j��)�ٶȵ�׃�����ɱ��������ƣ���ԭ�c���_��������Ŀǰ����������(sh��)�C(j��)�����Ö��c����
2��������������c�ķ�ʽ
�������c�ķ�ʽһ����Է֞����N���
(1)�քӻ�ԭ�c�r.��ԭ�c�S���ԅ���(sh��)�O(sh��)�õĿ����Ƅ��ٶ���ԭ�c�����Ƅ�;��(d��ng)�p�ٓ��K����ԭ�c�p���_�P(gu��n)��������ԭ�c�S�p�ٵ�ϵ�y(t��ng)����(sh��)�O(sh��)�õ��^�������c��λ�ٶ�����^����ǰ�ƄӮ�(d��ng)�p���_�P(gu��n)��ጷź��������(sh��)��ϵ�y(t��ng)�_ʼ�z�y���a���Ė��c�����}�_��(d��ng)ϵ�y(t��ng)�z�y����һ�����c���}�_��������늄әC(j��)�R��ֹͣ�D(zhu��n)����������(d��ng)ǰλ�ü���C(j��)�����c����
(2)��ԭ�c�S���ԅ���(sh��)�O(sh��)�õĿ����Ƅӵ��ٶ���ԭ�c�����Ƅ��������(d��ng)�p�ٓ��K����ԭ�c�p���_�P(gu��n)�r������������S�p�ٵ�ϵ�y(t��ng)����(sh��)�O(sh��)�á��^���ą����c��λ�ٶ����ݔ���෴�����Ƅ�;��(d��ng)�p���_�P(gu��n)��ጷź�������(sh��)��ϵ�y(t��ng)�_ʼ�z�y���a��Ė��c�����}�_�����(d��ng)ϵ�y(t��ng)�z�y����һ�����c�����}�_��늄әC(j��)�R��ֹͣ�D(zhu��n)����������(d��ng)ǰλ�Ñ�(y��ng)��C(j��)�����c��
(3)��ԭ�c�S���ԅ����O(sh��)�õĿ����Ƅӵ��ٶ���ԭ�c�����Ƅ������(d��ng)�p�ٓ��K����ԭ�c�p���_�P(gu��n)�r�������S�p�ٵ�ϵ�y(t��ng)����(sh��)�O(sh��)���^���ą����c��λ�ٶ�������S���෴�����Ƅ���������(d��ng)�p���_�P(gu��n)��ጷź����������D(zhu��n)�S�ٴη���;��(d��ng)�p���_�P(gu��n)�ٴα����º���������(sh��)��ϵ�y(t��ng)�_ʼ�z�y���a���Ė��c�����}�_;��(d��ng)ϵ�y(t��ng)�z�y����һ�����c�����}�_�������늄әC(j��)�R��ֹͣ�D(zhu��n)�������(d��ng)ǰλ�ü���C(j��)�����c��
(4)��ԭ�c�S����������̖�����������ڮ�(d��ng)ǰλ����һ���^�����ٶ���̶��ķ����Ƅ����ͬ�r��(sh��)λϵ�y(t��ng)�_ʼ�z�y���a�̵Ė��c�����}�_������(d��ng)ϵ�y(t��ng)�z�y����һ�����c�����}�_��늄әC(j��)�R��ֹͣ�D(zhu��n)�������(d��ng)ǰλ�ü���C(j��)�����c��
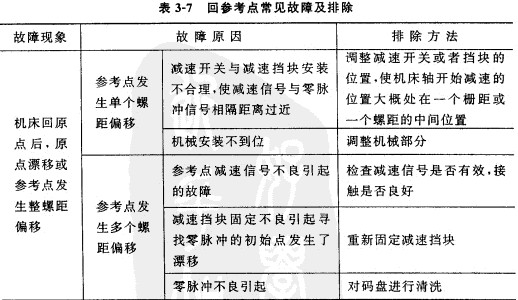
3������������c���ϼ��ų�
��(d��ng)��(sh��)�؛_�������c���F(xi��n)���ϕr�������șz��ԭ�c���ړ��K�Ƿ��Ʉ��������p���_�P(gu��n)�̶��Ƿ��ι��ڻp������ðٷ�������x�M(j��n)�Мy�����_���C(j��)е����λ���Ƿ�Ư�Ɣn�ڜp���K�K���L�����������b��λ���Ƿ����;�z���ԭ�c����ʼλ������ԭ�cλ�á��͜p���_�P(gu��n)��λ������֮�g���P(gu��n)ϵ����_����ԭ�c��ģʽ�Ƿ����_;�_����ԭ�c�����õķ���Ԫ��������͡��z�����P(gu��n)��ԭ�c�ą���(sh��)�O(sh��)���Ƿ����_��������_�J(r��n)ϵ�y(t��ng)��ȫ�]�h(hu��n)߀�ǰ��]�h(hu��n)�Ŀ���;��ʾ���ՅΙz���}�_���a�����ųߵ����c�}�_�Ƿ���F(xi��n)�ˆ��}:�z��PLCϵ�y(t��ng)�Ļ��㸩̖��ݔ���c�Ƿ����_.
�����c��Ҋ���ϼ��ų�Ҋ�±�